Computational 3D Metrology for Industrial Inspection and Mixed Reflectance Scenes
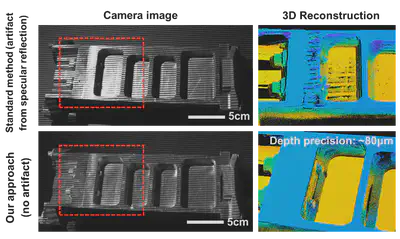
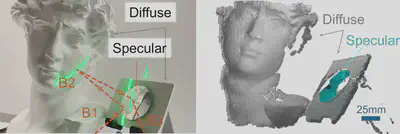
The fields of optical 3D metrology and computational imaging have spawned several high-quality 3D imaging principles in the last decades, with some of them able to reach accuracies in the 100μm range or even better. However, virtually all measurement principles reach their best performance either on purely diffuse or purely specular surfaces. Surfaces with “mixed reflectance” properties are still presents a challenge for current measurement principles. This is a contradiction, as only a fraction of objects around us have purely diffuse or purely specular surfaces. In particular, industrial inspection applications frequently need to deal with “shiny” metallic or painted parts, which present severe problems to state-of-the-art imaging solutions.
In the 3DIM lab, we invent, develop, and build a series of 3D sensors that perform equally well on mixed reflectance surfaces as they do on purely specular or purely diffuse surfaces.
Radiometric calibration of active 3D imaging setups using superquadric fitting.
Interferometry and Structured Light 2024, 2024.
“On-the-Fly” Radiometric Calibration of Active 3D Imaging Setups using Superellipse Fitting.
Frontiers in Optics, 2023.
Official Wyant College of Optical Sciences, University of Arizona research news release:
“Beyond Ambiguous Reflections: Bridging Optical 3D Metrology and Computer Vision” (Mar. 27, 2025)
Research news featured on external websites (selection):
Phys.org: “Beyond Ambiguous Reflections: Bridging Optical 3D Metrology and Computer Vision” (Mar. 27, 2025)
Optica Foundation: LinkedIn Channel (April 7, 2025)
Bioengineer: “Clarifying Complex Reflections: Integrating Optical 3D Metrology with” (Mar. 27, 2025)
Eureka!: “New Advances in 3D Imaging for Specular Surfaces”(Mar. 31, 2025)

Optics and Lasers in Engineering, 178, 2024.
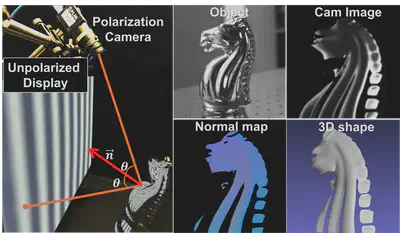
Computational Imaging for Scene Understanding: Transient, Spectral, and Polarimetric Analysis (2024), 2024.
Exploiting wavelength diversity for high resolution time-of-flight 3D imaging.
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 43(7), 2021.
Full-Field Vibrometry Through Scattering Media Using Synthetic Wavelength Holography.
Optica Open Preprint, 2026.
WISHED: Wavefront imaging sensor with high resolution and depth ranging.
2020 IEEE International Conference on Computational Photography (ICCP), 2020.
SH-ToF: Micro resolution time-of-flight imaging with superheterodyne interferometry.
2018 IEEE International Conference on Computational Photography (ICCP), 2018.
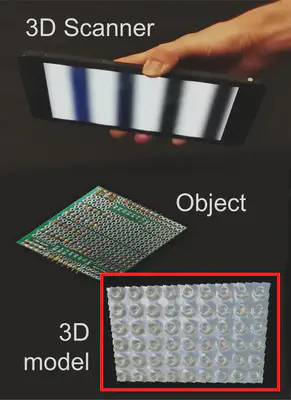
This novel procedure allows us to use the entire scene as a virtual screen, using only a scanning laser and an event camera. The resulting system achieves fast and motion-robust reconstructions of mixed reflectance scenes with high accuracy. Moreover, we demonstrate an ”ultrafast" capture mode (250Hz) for the 3D measurement of diffuse scenes.
Research news featured on official University of Arizona Websites:
Local Radio Interviews and Reports:
Interview KVOI Radio: “The Morning Voice”
Research news featured on external websites (selection):
Bioengineer: “Transforming Environments into a ‘Virtual Screen’ Enhances 3D Machine Vision” (May. 20, 2026)
Accurate and fast event-based shape measurement of mixed reflectance scenes.
Nature Communications, 17, 4407, 2026.

In a related concept dubbed “Flying Triangulation”, we pair a “sparse” single-shot line triangulation sensor projecting ~10 straight narrow lines with sophisticated real-time registration algorithms. The captured sparse 3D line profiles are registered to each other ‘on-the-fly’ while the sensor is free-hand guided around the object, or the object is moved in front of the sensor (see videos). The result is a dense 3D model of the object with high depth precision.
Visit the Osmin3D YouTube channel for more Videos.
Color 3D Movie of a talking face - RAW data (no post processing)
Color 3D Movie of another talking face - RAW data (no post processing)
Real-time 3D movie of a boncing ping-pong ball - RAW data (no post processing)
Real-time 3D movie of a folded paper - RAW data (no post processing). High object frequencies are preserved
How to watch a ‘3D movie’
3D movie of a talking face with unidirectional lines plus closeup - RAW data (no post processing).
3D movie of a talking face with unidirectional lines - RAW data (no post processing).
Flying Triangulation Dental Scanner
Flying Triangulation Face Scanner
3D models measured with Flying Triangulation (no post processing).
360° scan of a plaster bust.
Interview Flying Triangulation (March 2013)
German with english subtitles
Single-Shot 3D Sensing Close to Physical Limits and Information Limits.
Book, Springer Theses, 2019, Dissertation, University Erlangen-Nuremberg, 2017.
AIP Conference Proceedings, 2013.
Skinscan: Low-cost 3d-scanning for dermatologic diagnosis and documentation.
2021 IEEE International Conference on Image Processing (ICIP), 2021.